机器视觉算法
Machine vision algorithm.
机器视觉算法的概述
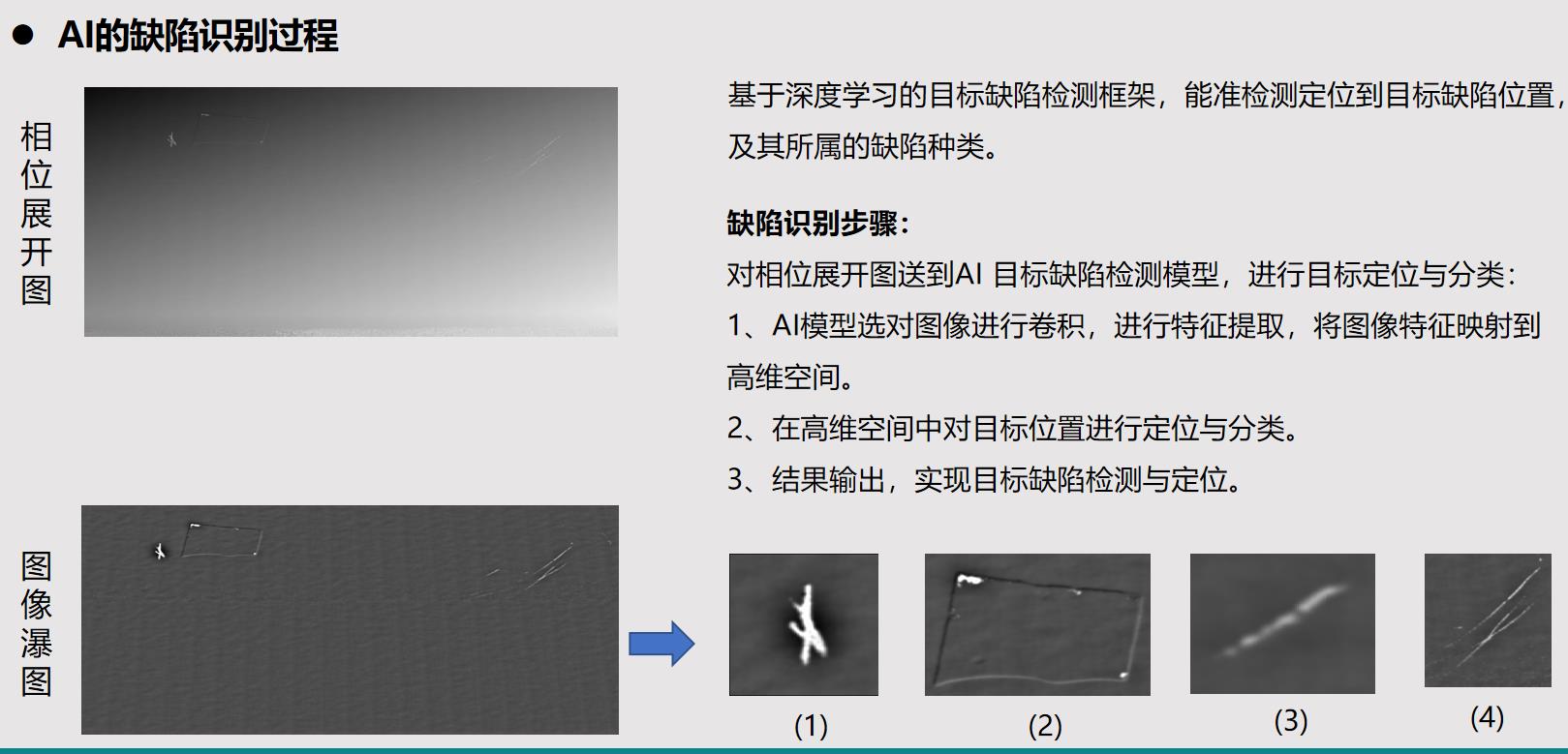
传统算法:特征提取(如SIFT, HOG) + 分类器(如SVM)AI算法(深度学习): 卷积神经网络(CNN):是图像分类的基石。 经典模型:ResNet, VGG, MobileNet(常用于移动端或嵌入式设备,追求速度与精度的平衡)。

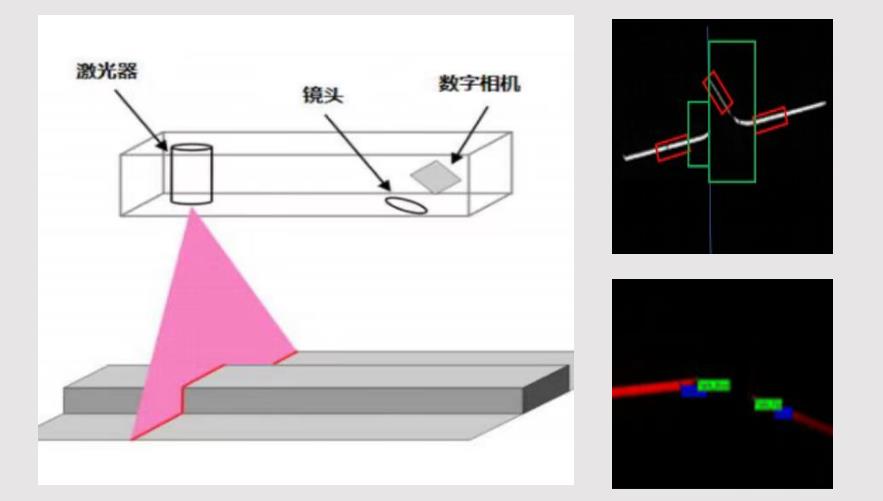
间隙面差检测-检测原理 基于平面三角几何,用一束激光以某一角度聚焦在被测物体表面,然后从另一角度对物体表面上的激光光斑进行成像,物体表面激光照射点的位置高度不同,所接受散射或反射光线的角度也不同,用CCD光电探测器测出光斑像的位置,就可以计算出主光线的角度,从而计算出物体表面激光照射点的位置高度